
Introduction and Context
As we know today, the Arctic
Melt Ponds and their Impact on the Arctic Climate
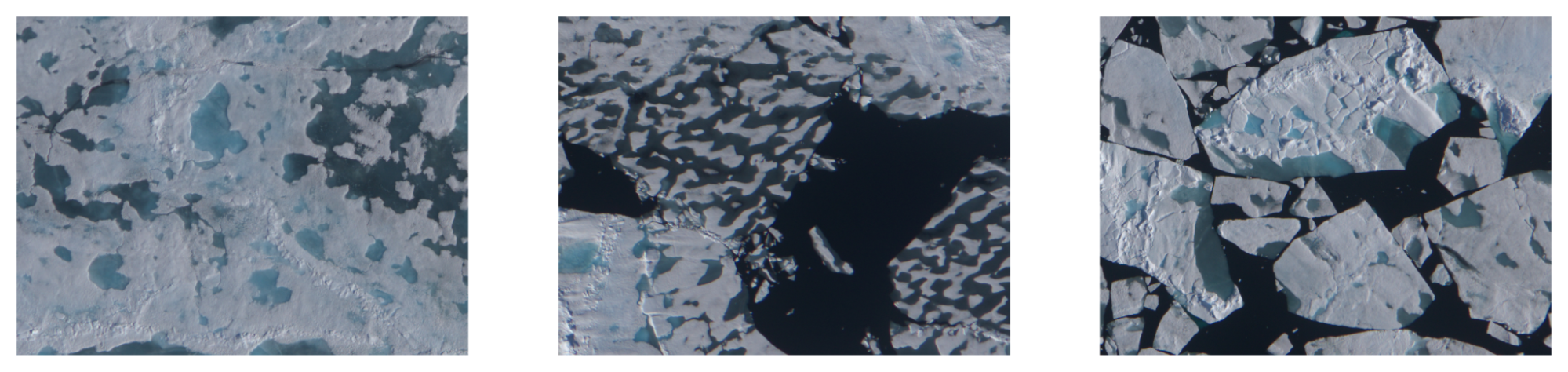
Strong seasonal changes in the Arctic surface structure occur in summer, when temperatures rise close to or above freezing. The melting of sea ice and snow leads to the formation of ‘melt ponds’, pools of water that collect on areas of lower elevation (Figure 1). They begin to appear around the end of May, covering up to 60-80 percent of the sea ice area at the peak of melt, and then refreeze in August and September.
Monitoring and understanding the dynamics of melt ponds is essential for predicting sea ice melt and for assessing the
Methods for Observing Melt Ponds
Accessing melt ponds is hampered by the remoteness of the Arctic Ocean. Remote sensing techniques such as satellites and helicopters allow researchers to observe the Arctic from a distance. The area covered by melt ponds can be inferred from images taken by these platforms.
Satellites are a promising method in the long term because they can monitor large parts of the Arctic on a regular basis. However, to date, high-resolution satellite images have been limited due to cloud cover or satellite orbit constraints.
To fill this gap, helicopter measurements are used
At the
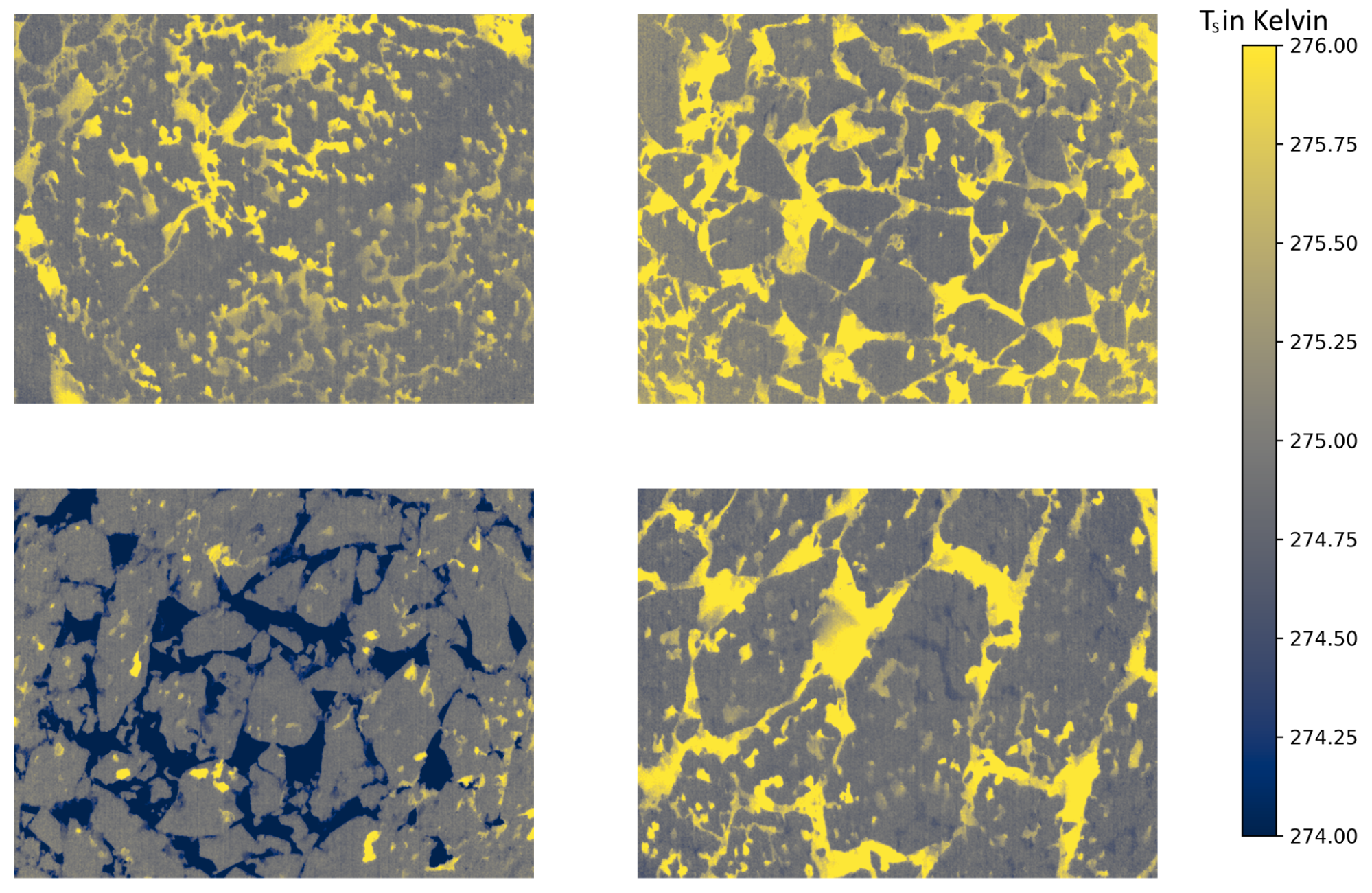
This article focuses on thermal infrared (TIR) imagery instead (Figure 2).
How TIR Segmentation Works
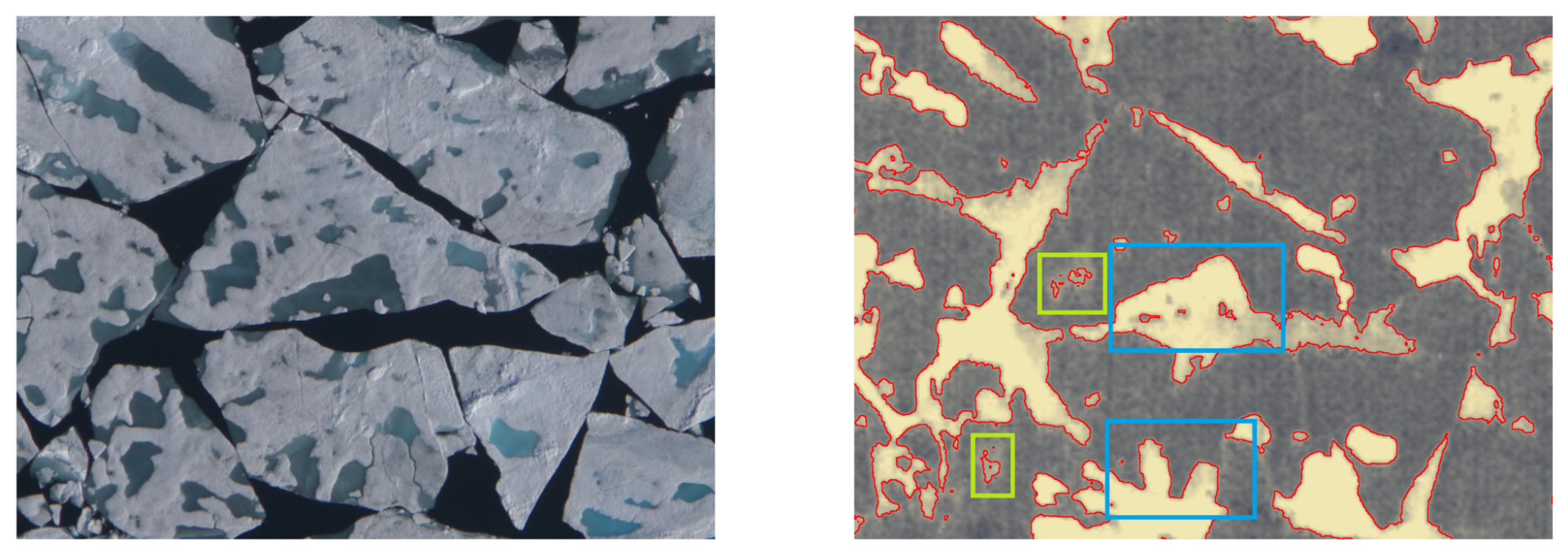
Semantic segmentation is an image analysis technique used to classify each pixel into a predefined category.
In VIS, segementation is often achieved through traditional image processing techniques such as
For TIR imagery, spatially and temporally varying temperatures place special demands on the
TIR segmentation thus requires a more general method that can consider multiple features such as shape and size simultaneously.
Feature Extraction with Convolutional Neural Networks
Deep learning involves a variety of architectures that mimic the neural network structure of the human brain.
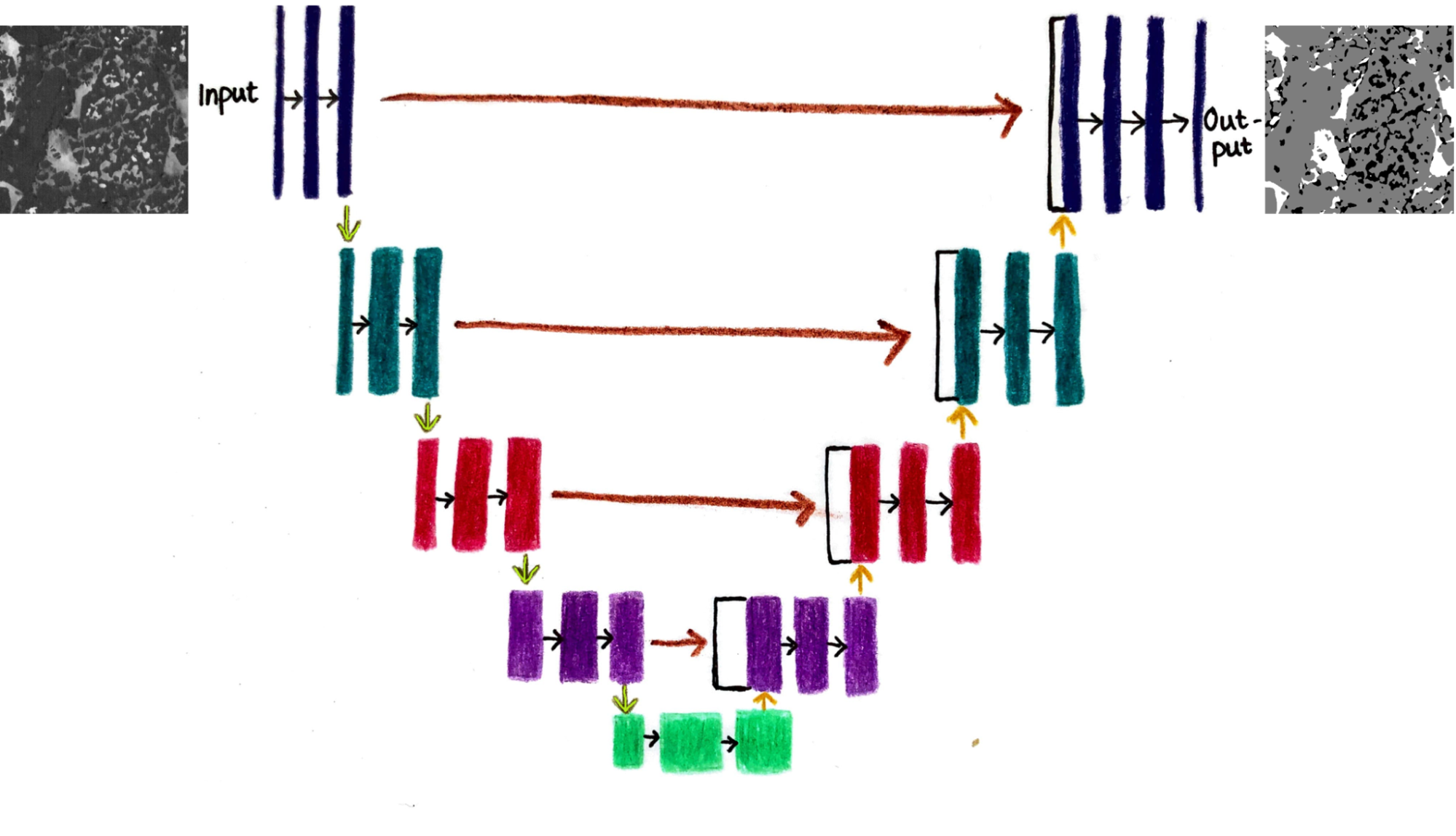
Semantic Segmentation with U-net
To be suitable for the task of segmentation, a convolutional neural network (CNN) needs to be embedded in a more complex architecture that is able to map the learned features back to the pixel space. A famous architecture in this respect is
U-net has achieved significant results in a variety of fields, including satellite image analysis,
Training of Deep Learning Models
To be able to perform well on unseen images, deep learning models must be trained on a large amount of
U-net has been shown to perform well even with relatively few training images.
Experiments and Results
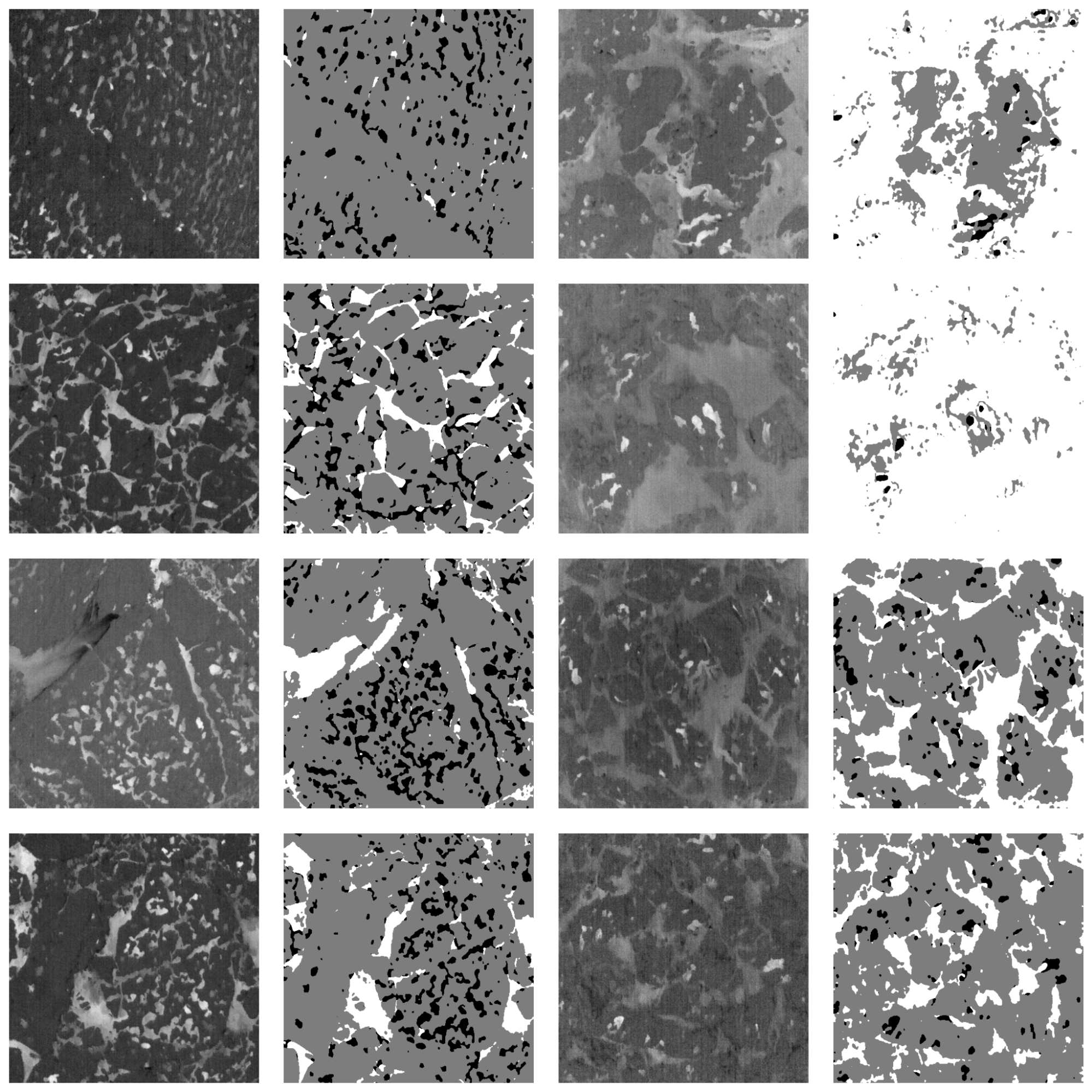
To test U-net’s usefulness for detecting melt ponds using TIR, I labeled ten TIR images taken during a helicopter flight during the
The results are shown in Figure 5. While some images can be predicted relatively well, this is not the case everywhere. In particular, images taken on a different flight than the training data were segmented incorrectly.
Conclusion
Achieving accurate segmentation of TIR images would open avenues for better understanding the characteristics of Arctic sea ice during the summer. Deep learning methods can help with the challenging task of TIR segmentation, as shown by its successful predictions in the second column of Figure 5. So far, the generalisability of the model is hampered due to limited training data. The development of an operational method remains an ongoing research area, with a particular need to label more representative training data from different flights and areas.